论文链接:[1]
I.Introduction
- AUV可分为UUV (unmanned undersea vehicles)和ROV(operated underwater vehicles),前者指无需人进行操控的水下机器人,后者指需要线缆连接母船进行人工操作的水下机器人。
- 根据控制结构,可以分为完全驱动系统以及欠驱动系统。
- 完全驱动系统中,利用高增益的反馈来抵消系统本身的动态特性,让系统强制按照规划好的轨迹来运动。这带来的极大的能量损失,且环境适应性很差[2]。
- 欠驱动系统中,对于运动动力加以利用而不是抵消,消耗能量更少且运动会更自然,对环境的适应性更强,但是控制难度大,难以保证系统的稳定性[2:1]。
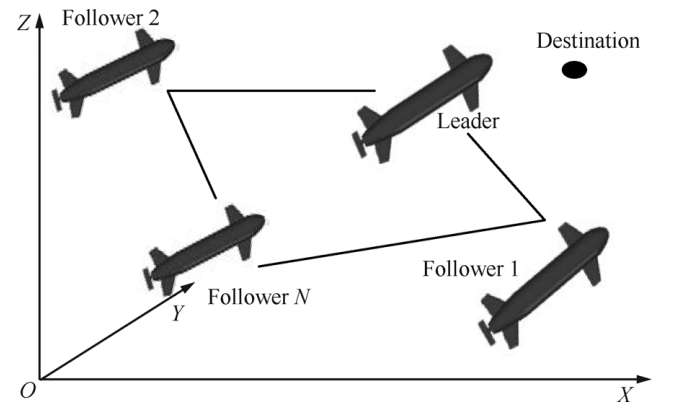
- 编队控制主要包含以下两个问题:编队调节控制(formation regulation control)和编队跟踪控制(formation tracking control)。要选择合适的水下机器人动力学与运动学模型以保证编队控制。
- 编队调节控制:一组机器人编队称为刚体编队,使得在这个“刚体”在运动的过程中保持固定队形,但在受障碍物等影响时会灵活调节的控制过程称为 formation regulation control.
- 编队跟踪控制:通过AUV之间的通讯,使得编队可以按照期望的轨迹进行运动的控制称为 formation tracking control.
- 在路径跟踪控制问题中,要根据“自由度”和“仅由规划器来控制的方向”来避免对一些方向的控制;对于位置控制而言,要引导AUV的实际路径与期望路径相重合且无时间限制。对于前向速度而言 ,要强制设定实际速度为期望速度。
- 水下机器人的协同合作控制主要分为如下两类:
-
多AUV的编队控制( formation control of multiple AUVs ).
编队控制是指对于一组AUV的相对位姿的控制、以及允许这组AUV以整体的方式进行运动的问题。主要包含以下三个问题:
1. 对于可行队形的分配。
2. 保持以编队形态进行移动。
3. 不同编队的切换。
-
多AUV的集群控制( flocking control of multiple AUVs ).
集群控制与编队控制相似,但相比于编队控制,集群控制中的AUV之间没有距离限制,而编队控制中各AUV间的距离是固定的。因此一般来说,研究的重点都放在编队控制之中。
II.AUV dynamics
在本文中该部分叙述较为简单,请转至“欠驱动自主水下航行器目标跟踪与编队控制策略研究”一文之总结